
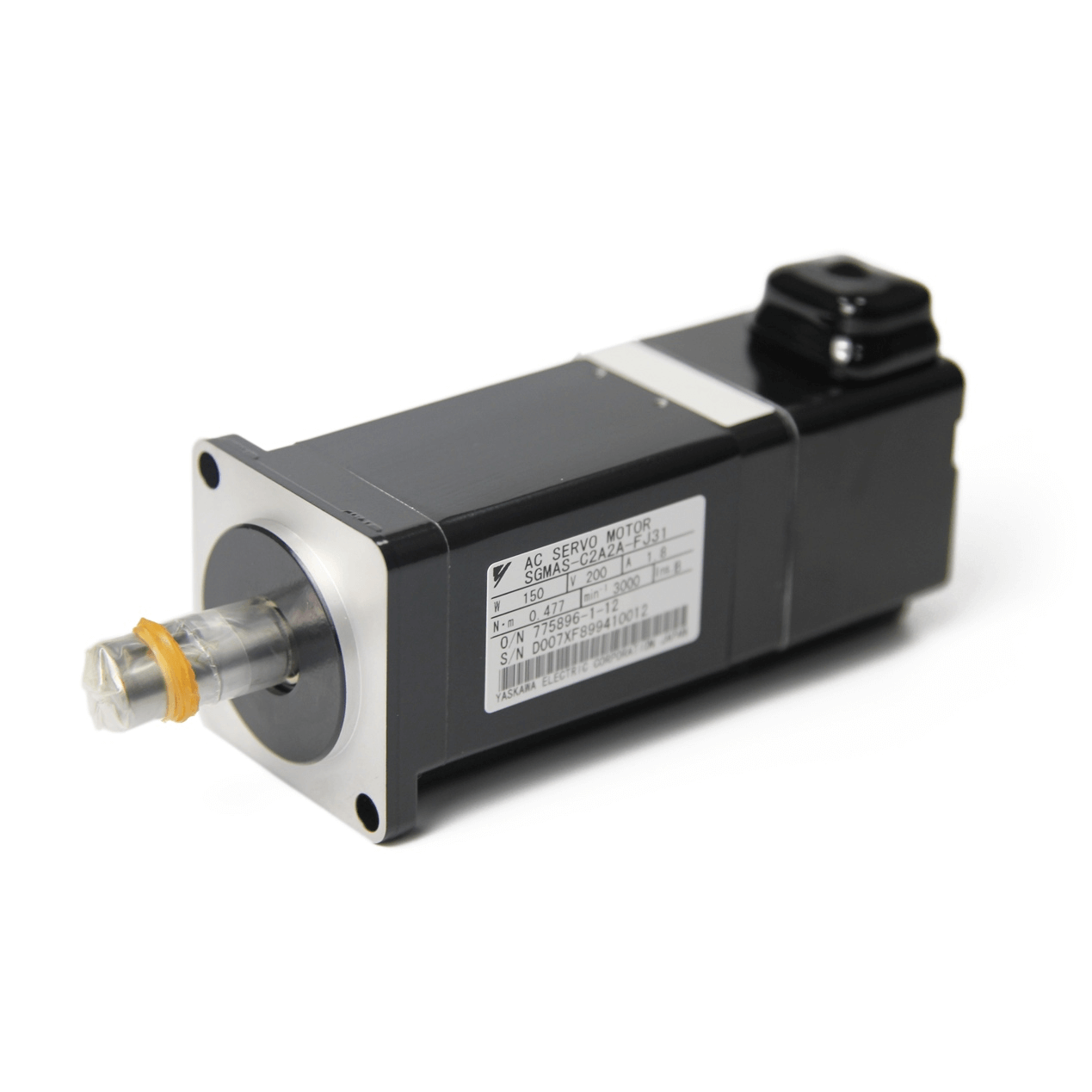
図1: サーボモータはサーボシステムの中核部分です。
情報、通信、自動化技術の発展に伴い、現代世界の産業生産や日常生活では、さまざまな自動制御装置が使用されています。 サーボモータとサーボドライブから構成されるサーボシステムは、自動制御のための最も一般的なデバイスの1つとして、私たちの日常生活に広く使用されています。
ここの記事を読むことで、サーボモーターとサーボドライブが正確にどこで使用できるのかをより深く理解することができます。
1. サーボシステムとは何ですか?
サーボ システムは、プロセスを正確に追跡または再現するために使用されるフィードバック制御システムです。
サーボ システムの主要コンポーネントの 1 つであり、その実行部分であるサーボ モーターは、入力 (または指定された値) に応じて、オブジェクトの位置、方向、状態、およびその他の出力制御量を変更します。
その役割は、制御コマンドの要件に従って電力を増幅、変換、調整することで、駆動装置の出力トルク、速度、位置制御が非常に柔軟で便利になります。
2. サーボシステムの構成要素
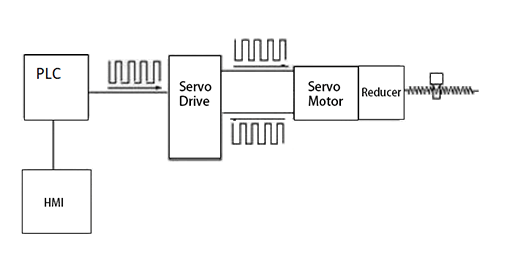
このシステムは主に、HMI タッチ スクリーン、PLC、サーボ ドライブ、永久磁石同期サーボ モーターで構成されています。 サーボモーターはムーブメントの実行機構です。 ユーザーの機能要件を満たすように、位置、速度、電流の制御を行います。
図2:サーボシステムは、PLC、ドライブ、モーター、減速機、インターフェースで構成されます。
3. サーボシステムの特徴・用途・種類
3.1 サーボシステムの特徴
閉速度・位置ループを構成するには正確な検出装置が必要です。
さまざまなフィードバックと比較の原則
フィードバック比較の原則と方法にはさまざまなものがあります。 情報フィードバックを実現するための検出装置の原理とフィードバック比較のさまざまな方法に応じて、パルス比較、位相比較、振幅比較が一般的に使用されます。
高性能サーボモーター
効率的で複雑な表面加工を行う NC 工作機械では、サーボ システムが頻繁に始動とブレーキを実行することがよくあります。 そのため、大きな加速トルクや制動トルクを発生させるためには、モーターの出力トルクと慣性モーメントの比を大きくする必要があります。 また、サーボモータには、機械可動部との接続における中間リンクを最小限にするため、低速時の十分な出力トルクとスムーズな動作が求められます。
さまざまな速度を備えた優れた調整システム
幅広い速度調整が可能なシステム、すなわちスピードサーボシステム。 システムの制御構造から、CNC工作機械の位置閉ループシステムは、外側のループで位置調整を行い、内側のループで速度調整を行う二重閉ループ自動制御システムとして見ることができます。
実際の内部処理プロセスは、入力された位置を対応する速度信号に変換し、その信号がサーボ モーターを駆動して実際の変位を実現します。 CNC工作機械の主動作には高速な調整性能が要求されるため、サーボシステムには広い速度範囲で優れた調整性能が求められます。
3.2 サーボシステムの用途
低電力指令信号で高電力負荷を制御します。
インプットシャフトにより制御し、遠隔同期伝動を実現します。
出力機械変位を電気信号に正確に追従させ、記録や指示計器などに使用します。
3.3 さまざまな種類のサーボ システム
| 標準 | 種類 |
| コンポーネントの特徴 | * 電気サーボシステム |
| * 油圧サーボシステム | |
| ※電動油圧サーボシステム | |
| ※電動サーボ方式 | |
| システム出力の物理的特性 | * 速度または加速度サーボシステム |
| * 位置サーボシステム | |
| 信号機能特性 | * アナログサーボシステム |
| * デジタルサーボシステム | |
| 構造的特徴 | * シングルループサーボシステム |
| * オープンループサーボシステム | |
| * クローズドループサーボシステム | |
| 駆動コンポーネント | * ステッパーサーボシステム |
| ※直流モーター(DCモーター)サーボシステム | |
| ※交流モーター(ACモーター)サーボシステム |
表1:さまざまな種類のサーボモーター。
4. サーボシステムを使用する産業
レーザー加工分野
ロボット工学
CNC旋盤分野
大規模集積回路製造用のOA機器
レーダーおよびその他のハイテク分野
5. サーボシステム応用の今後の動向
自動制御システムは理論的に急速に発展するだけでなく、その応用機器も急速に変化します。 3~5年ごとに新製品が登場します。
従来のACサーボモータの特性は柔らかく、出力は単一値ではありません。
ステッピング モーターは一般にオープン ループ制御であり、正確に位置を特定することができません。 モーター自体にも速度共振領域があります。
PWM 速度制御システムは位置追従性能が劣ります。 周波数変換速度の調整は簡単ですが、精度が十分でない場合があります。
位置サーボシステムには、優れた性能を誇るDCモーターサーボシステムが広く使用されています。 しかし、構造が複雑であること、超低速時の不感帯の顕著な矛盾、反転ブラシによる騒音やメンテナンスの問題などの欠点があります。
新しい永久磁石 AC サーボ モータは、特に制御方法が方形波から正弦波に変わったときに急速に発展しました。 システムパフォーマンスが向上し、速度範囲が広く、低速でも優れたパフォーマンスを発揮します。
投稿日時: 2022 年 2 月 10 日






